Project Details
Device Description (Description limited due to NDA):
The orthotic device used rigid parts to keep the Patient Tester's hand open when needed and reduce hand and finger adduction. However, its soft body still allowed
for movement elsewhere. Force was transmitted from arm extension into hand and finger flexion. Once a certain amount of force was reached the hand and clutch would
reset, allowing the process to repeat.
CAD:
SolidWorks’s GearTrax was used to create gears that could then be modified as needed. Equations made sure roller clutch adjustments were timely and guaranteed the
angle of grip would always be such that the bearings would not bounce out and cause a slip. Tables and equations were used for all parts for speed of adjustment.
Design For Manufacturing:
Each part was designed to be 3D printed. I validated finished parts to ensure they would be optimal for 3D printing.
Design:
The design of each part was influenced by the engineering requirements as derived from the customer needs and state of the field
analysis. These rigid body parts would be attached to a soft sleeve and cable system. This system is lightweight and breathable, ideal for daily use.
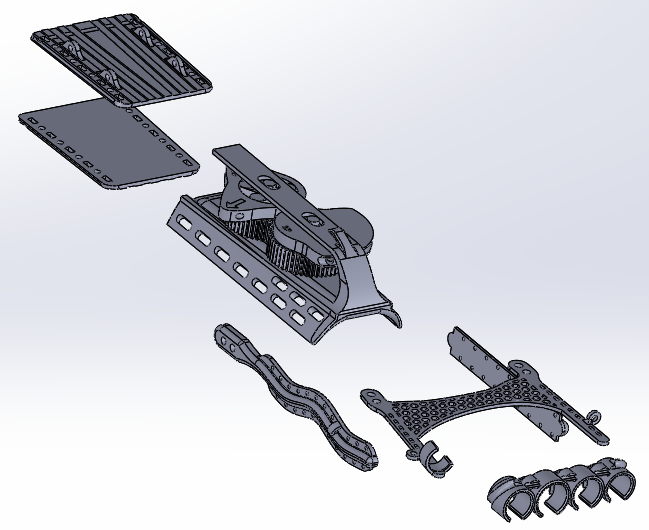
Exploded View of Exoskeliton.